求助关于TL431在48V电路应用中耐压的问题
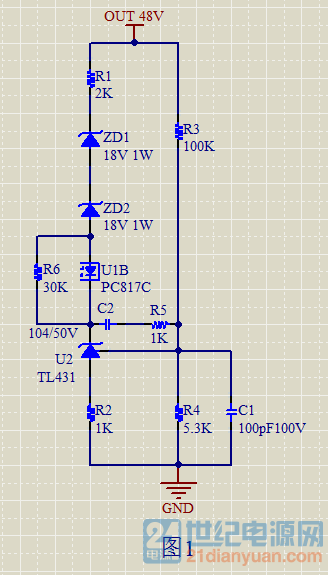
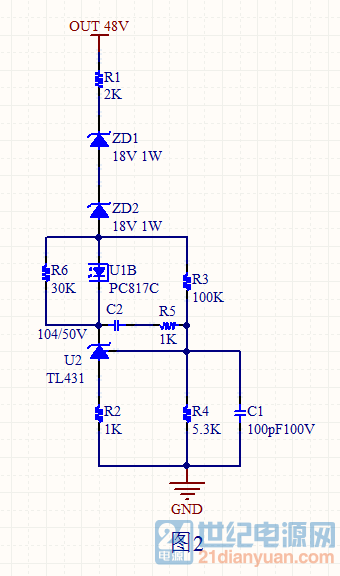
更正一下,图2满载电压会慢慢升高到55V,图2满载电压会慢慢升高到49.07V后稳定。图2中R4不是5.3K,是26.3K
431最下面不要发电阻
431串联足够大的电阻,使431满足最小1.5ma电流即可50V串联30K电阻即可
那个二极管全部去掉
QQ图片20170813151527.png (116.71 KB, 下载次数: 7)
下载附件
但是还有一个稳压管,会不会温度升高后,输出的电压会有变化。我个人感觉只要有稳压管,它就会随温度的升高,输出电压会慢慢升高。 如果使用稳压管就不要在使用431了啊 最好用电阻串联 首先你的满足431的工作电流1到100MA,串电阻和稳压管都行, 用两个稳压管串联,不用TL431我也是使用过,前面再加2K的电阻,5.1K 、10K的电阻,还是电压会慢慢往上升高,我也郁闷了,人家也都是这么用,我用就不行,我想跳楼了。 那说明你别的参数设计有问题,但你把问题归结到了稳压管上。 稳压管电压漂移并不会导致输出电压不稳。取决于后面的取样和431 我也串联过稳压管降压,温度从-40度到70度,输出电压没问题啊。 理论上是没有问题,但是应用就不理想,郁闷。 那就看看是什么原因造成的啊,比如设计48V,结果飘到55V,难道你的环路不调整输出?为什么环路不减小占空比将输出调整下来?找到问题才好解决。 C2这么大可以么? 参数调整一下,或者电容质量问题 短路掉R2吧 我认为这种情况是
1,流过光耦的电流不足,反馈失调。
2,R2由于导通电流的变化引其上的电压变化,导致431的检测基准漂移
由这两方面共同造成的输出电压失调。我觉得最好在光耦的输入端到地并一个容量较大的电容,不然负载变化时输出也会有电压失调现象
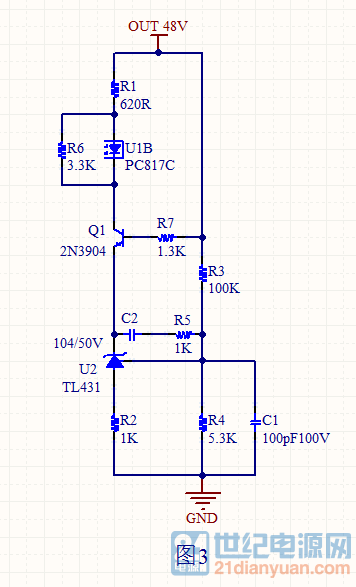
那楼上认为流过光耦的电流多大呢 问题解决了吗 ,你这48V ,我这要用到 220V 更崩溃占空比 都是一个周最大占空比 然后几个周期后一个周期突然减小 只说图1.
R2 放在那里做什么,直接换成0R。
R6 太大(难道是为了省电),改成1~2k。 您好 我的和他的类似 是不是这样用呢
FB.png (35.51 KB, 下载次数: 8)
下载附件
用电阻分压后,给431和光耦供电吗?
R8应该改为直接并在光耦两端,阻值1~2k。 对, R8 是并在光耦两端,我刚看见 ,改图的时候可能改错了,可调电阻式调节流经二极管的电流,R8 是光耦二极管在不导通的时候给TL431提供一个工作电流。。
请问这个电路存在问题吗?
FB2.png (38.68 KB, 下载次数: 7)
下载附件
电路原理上可以。
至于 阻值,容值这些,就要经过计算和调试了。 恩 好的 谢谢啦。我的问题在另一篇帖子上,您如果有时间也帮我看看 好吗 ?
BUCK电路 NCP1252 +TL431+光耦反馈的驱动波形 占空比问题,突然占空比减小-综合电源技术-世纪电源网社区
http://bbs.21专注于大电流电感设计、制造/thread-292770-1-1.html
这个帖子在哪见过,楼主是不是发过类似的帖子啊 最近才发的 下端阳极不应该有电阻,参考端电压是以下端为参考的,当反馈量大的时候电阻压降会把下端电压抬上去,导致参考点电压也要往上抬,导致输出也跟在变大了
平面变压器厂家 | 平面电感厂家
无线数传电台在自来水行业 的应用设计0 引言 在工业自动控制系统中,数据的传输是实现自控的基础,数据传输可以简单地分为有线(包括架设光缆或租用电话专线)和无线(分为建立专用无线数据传输系统或借用CDPD,GSM,CDMA等公用网络信息平 labview与solidworks联合仿真时出现错误提示仿真程序运行时出现错误提示,这是怎么回事? MOS管单脉冲能量怎么评估?如附件的电路图,开始时MOS管处于关断状态,电容电压为0V。当MOS的gate突然加一个15V的高电压,电容C1开始充电,电压上升,即MOS管的DS电压开始从400V下降到0V的过程中,Vds>Vgs-Vth,MOS 
是运行到Error out 时出现错误提示,感觉是哪里设置不对,编程是没问题。就是不知道哪里设置不对
这是转动的仿真